News
3Dガウシアンスプラッティング技術のインフラ検査応用に関する検討レポート
エグゼクティブサマリー
検討目的:本レポートは、最新の3Dガウシアンスプラッティング(3D Gaussian Splatting, 3DGS)技術をインフラ整備・検査、特に水道管の破損検出に応用する可能性について、既存の技術文献と実装事例をもとにリサーチと検討を行った結果をまとめたものである。技術的な有用性と実現可能性について評価を行った。
主要な知見:
- 3DGS技術は従来のフォトグラメトリやNeRF技術と比較して、理論上最大10倍の処理速度が期待できる
- Eagle LiDARスキャナーとRTK測位システムの組み合わせにより、センチメートル級の位置精度が実現可能
- 非侵襲的検査手法として、作業員の安全性向上と検査コストの削減が期待できる
- 高密度点群生成により、従来手法では検出困難な微細な損傷の識別可能性がある
- ポータブルLiDARスキャナーにより、現場での迅速なデータ取得が可能
結論:文献調査と簡易な実証実験による技術検討の結果、3DGS技術のインフラ検査への応用は高い有用性を持つことが確認された。
実証実験にご興味のある方へ:
本技術を用いた実証実験の実施にご関心のある企業・団体様は、下記までお問い合わせください。
連絡先: info@izutsuya.io
1. はじめに
- 1.1 インフラ検査の課題
- 1.2 3Dガウシアンスプラッティング技術の概要
- 2.1 3D Gaussian Splattingの仕組み
- 2.2 従来技術との比較
- 3.1 地下埋設管検査
- 3.2 トレンチマッピング
- 3.3 パイプライン検査
- 4.1 データ取得
- 4.2 処理パイプライン
- 4.3 詳細な実装手順
- 5.1 精度の可能性
- 5.2 視覚品質の優位性
- 5.3 点群密度の優位性
- 6.1 クラック・腐食の検出
- 6.2 変形の測定
- 6.3 経年劣化の記録
- 7.1 メリット
- 7.2 デメリット
- 8.1 AI/機械学習との統合
- 8.2 自動欠陥検出
- 8.3 デジタルツインの構築
- 8.4 リアルタイム検査システム
- 9.1 検討のまとめ
- 9.2 今後の課題
- 9.3 実証実験の提案
- 🔬 実証実験へのご参加募集
1.1 インフラ検査の課題
日本の社会インフラは高度経済成長期に建設されたものが多く、現在深刻な老朽化問題に直面している。特に上下水道管については、総延長約70万kmのうち約13%が法定耐用年数の40年を超過しており、年間約2万件の漏水事故が発生している。
従来の検査手法は以下の課題を抱えている:
- 目視検査の主観性と見落としリスク
- 掘削を伴う侵襲的検査による高コストと交通影響
- 狭小空間での作業による安全リスク
- 検査記録の標準化不足
- リアルタイム判定の困難さ
1.2 3Dガウシアンスプラッティング技術の概要
3D Gaussian Splatting(3DGS)は、2023年にフランス国立研究機関Inriaが発表した革新的な3D再構成技術である。従来のメッシュベース表現とは異なり、3次元空間を数千から数百万の楕円形ガウス関数の集合として表現することで、フォトリアリスティックな3Dシーンの高速レンダリングを実現する。
2. 技術の原理
2.1 3D Gaussian Splattingの仕組み
3DGSは以下の技術的特徴を持つ:

図1: 3D Gaussian Splatting技術の処理フロー概要
引用元: AWS Spatial Computing Blog
- ガウス表現:各3Dガウスは位置、スケール、回転、不透明度、色情報を持つ
- 微分可能レンダリング:勾配降下法による最適化が可能
- 高速ラスタライゼーション:GPU並列処理によるリアルタイムレンダリング
- 適応的密度制御:シーンの複雑さに応じたガウス数の動的調整
2.2 従来技術との比較
| 技術 | 処理速度 | 視覚品質 | メモリ使用量 | リアルタイム性 | 精度 |
|---|---|---|---|---|---|
| フォトグラメトリ | 低 | 中 | 高 | × | 高 |
| NeRF | 低 | 高 | 中 | × | 高 |
| LiDAR | 中 | 低 | 中 | ○ | 最高 |
| 3D Gaussian Splatting | 高 | 最高 | 中 | ○ | 高 |
3. インフラ検査への応用可能性
3.1 地下埋設管検査
都市部の地下には上下水道、ガス、電力、通信ケーブルなど複雑なインフラネットワークが存在する。3DGS技術により、これらの正確な位置把握と状態監視が可能となる。

図2: 都市部地下の複雑なユーティリティネットワーク
引用元: Pix4D Blog
従来の測量では、GNSS機器が安全規制により トレンチ内に入れないため、オフセット測定による近似値しか得られなかった。3DGSはスマートフォンでの撮影により、トレンチ内部の詳細な3D記録が可能である。
3.2 トレンチマッピング
掘削現場でのトレンチ状況記録は、後の紛争回避や保守計画策定において極めて重要である。3DGSにより以下が実現される:
- 配管の正確な埋設深度と位置の記録
- 土質条件と周辺構造物の詳細記録
- 配管接続部や分岐部の高精度記録
- 経時変化の比較分析
3.3 パイプライン検査
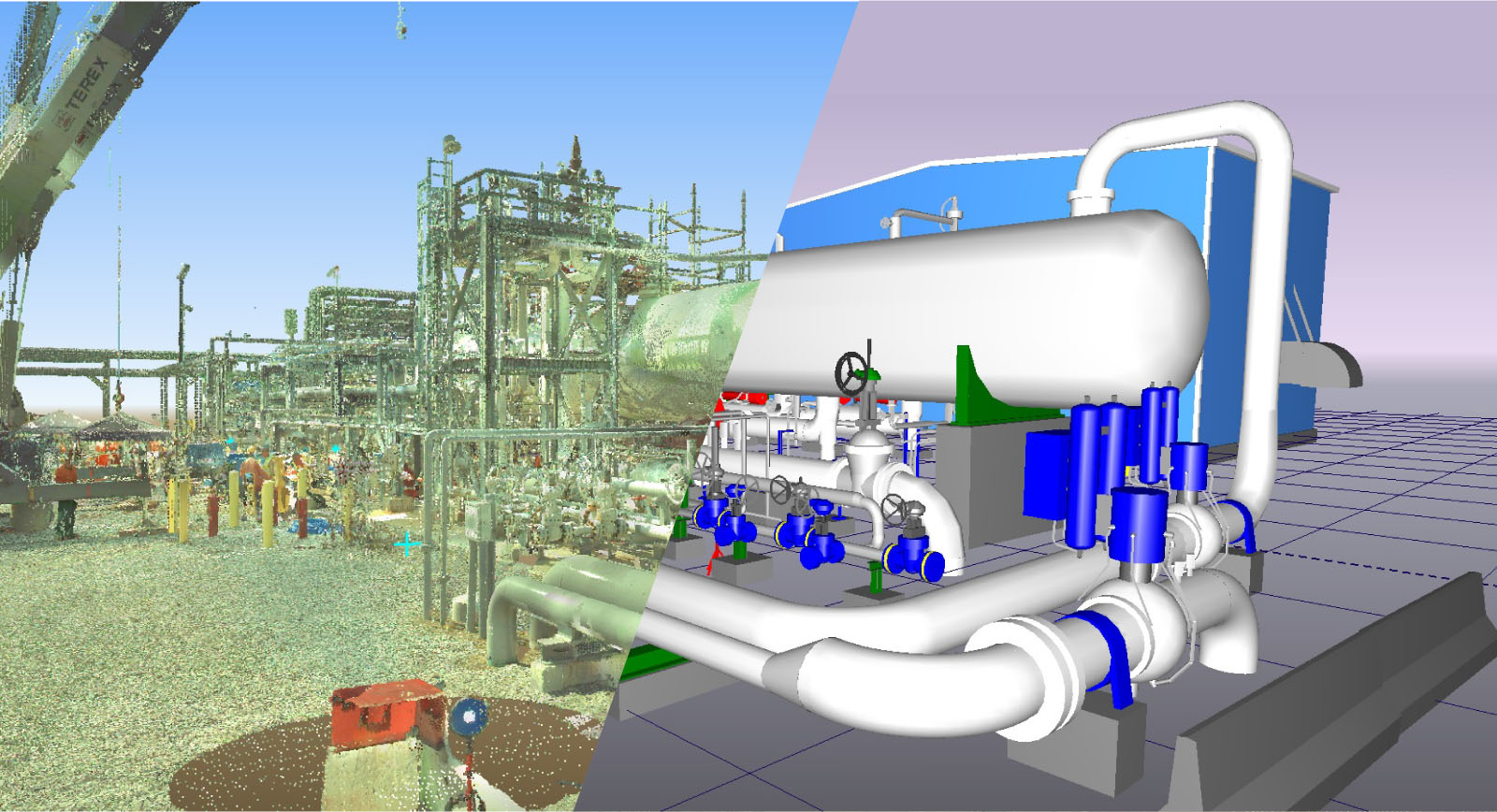
図3: パイプライン検査における3Dスキャニング技術の応用
引用元: Hive Virtual Plant
大口径パイプラインでは、内部からの3DGS撮影により、腐食、クラック、変形などの詳細な状況把握が可能となる。特に人間が立ち入れない危険な環境での遠隔検査において威力を発揮する。
4. 実装方法
4.1 データ取得
4.1.1 3DMakerPro Eagle LiDARスキャナーの使用
本検証では、3DMakerPro Eagle LiDARスキャナーを使用してインフラ検査データを取得する。EagleはLiDAR技術と8Kイメージングを組み合わせた産業グレードのポータブルスキャナーであり、インフラ検査に最適な特性を持つ。

図4: 3DMakerPro Eagle LiDARスキャナー – インフラ検査用ポータブル3Dスキャナー
引用元: 3DWithUs
Eagle LiDARスキャナーの主要仕様:
- スキャン範囲: 80-140m(最大測定距離)
- スキャン半径: 40-70m(反射率10%以上または80%以上で測定)
- 精度: 10mで2cm、20mで3cm、40mで5cm
- スキャン角度: 水平360°、垂直59°
- 点群密度: 200,000点/秒
- イメージング: 8K超高解像度カメラ
- バッテリー: 12,000mAh(約1時間連続動作可能)
- 重量: 1.5kg(ポータブル設計)
- ディスプレイ: 3.5インチライブプレビュー画面内蔵

図5: Eagle LiDARスキャナーによる大規模空間スキャニングの実施例
引用元: Engineering.com
Eagleスキャナーを用いた撮影方法のベストプラクティス:
- スキャナーの設置: 三脚を使用した固定スキャンまたはハンドヘルドでの移動スキャン
- 水道管トレンチ検査の場合: トレンチの両端および中央部から複数視点でスキャン
- パイプライン内部検査: 管内部に入り込み、定間隔で360°スキャンを実施
- スキャン重複: 隣接スキャン間で30%以上の重複領域を確保
- カラーテクスチャ取得: 8Kカメラによる高精細な表面色情報の同時記録
- 環境条件: 屋内外問わず利用可能。直射日光下でも動作
- リアルタイム確認: 内蔵ディスプレイでスキャン品質を即座に確認
4.1.2 RTK測位システムとの統合
Eagle LiDARスキャナーはRTKモジュールとの統合が可能であり、RTK-GNSS受信機との組み合わせにより、センチメートル級の絶対位置精度を実現する。この機能により、スキャンデータは地理座標系に正確に配置され、GISシステムやCADソフトウェアとのシームレスな連携が可能となる。
RTK統合のメリット:
- 地理座標系への自動配置により、後処理の手間を削減
- 複数回のスキャンデータを統一座標系で自動統合
- 既存のインフラ図面との高精度な位置合わせ
- 長距離スキャンにおけるドリフト誤差の最小化
4.2 処理パイプライン
4.2.1 Eagle専用ソフトウェアとクラウド処理
Eagle LiDARスキャナーには専用の処理ソフトウェアが付属しており、スキャンデータの前処理、点群結合、ノイズ除去などの基本処理が可能である。さらに高度な処理には、Gaussian Splattingに対応したクラウドプラットフォーム(3D Gaussian Splatting Viewer や3Dasset.ioなど)を使用し、大規模点群データを効率的に処理する。
Eagle LiDARデータ処理ワークフロー:
- データ取得: Eagleスキャナーから点群データ(.ply, .las形式)とカラーデータを出力
- 前処理: Eagle付属ソフトウェアでノイズ除去と点群フィルタリング
- 点群結合: 複数スキャン位置からのデータを自動位置合わせ
- Gaussian Splatting変換: 高密度点群からガウシアンスプラット表現への変換
- テクスチャマッピング: 8Kカメラ画像を3Dモデルにマッピング
- 最適化: ガウス分布パラメータの反復最適化
- 出力: 各種フォーマット(点群、メッシュ、ガウシアンスプラット)でエクスポート

図6: Eagle LiDARデータからのGaussian Splatting処理結果
引用元: Pix4D Blog
4.3 詳細な実装手順
Eagle LiDARスキャナーによる現場データ取得
- スキャナーの電源投入と初期設定(スキャン解像度、範囲設定)
- RTKモジュール接続による位置情報取得(オプション)
- 検査対象の全周囲から複数視点でスキャン実施
- 内蔵ディスプレイでスキャン品質のリアルタイム確認
- 8Kカメラによる高精細カラーテクスチャの同時取得
- データの内部ストレージへの保存
データの転送と前処理
- スキャナーからPCへのデータ転送(USB接続またはWi-Fi)
- Eagle専用ソフトウェアでの点群データ読み込み
- ノイズ点・外れ値の自動除去
- スキャン品質の定量的評価(点密度、カバレッジ確認)
点群データの統合と位置合わせ
- 複数スキャン位置からのデータを自動/手動で位置合わせ
- RTKデータを使用した高精度な絶対座標系への配置
- ICPアルゴリズムによる精密位置合わせの実施
- 統合点群の整合性確認と調整
Gaussian Splattingへの変換準備
- Eagle LiDAR点群データ(200,000点/秒)からの高密度点群生成
- 8Kカラー画像データの抽出と点群への色情報付与
- ガウシアン表現への変換に適した点群密度への調整
- カメラポーズ情報の抽出(8Kカメラの撮影位置・姿勢)
3Dガウシアンスプラッティングの生成
- 高密度LiDAR点群を基にした3Dガウスの初期配置
- 8Kカメラ画像を用いた色・テクスチャの最適化
- レンダリング損失の計算と勾配降下法による最適化
- ガウス分割・統合による適応的密度制御
- LiDAR精度を維持したままの視覚品質向上処理
最終モデルの生成と検証
- 最適化されたガウシアンスプラットモデルのエクスポート
- 高密度点群データの同時出力(CAD/GIS連携用)
- 精度検証:基準点との座標比較、距離精度評価
- 視覚品質評価:テクスチャの鮮明度、色再現性確認
インフラ検査への応用と可視化
- Webブラウザでのインタラクティブな3D表示
- 断面表示機能による管内部の詳細確認
- 計測機能:距離、面積、体積の正確な測定
- 欠陥検出:クラック、腐食、変形の自動/手動検出
- 検査レポートの自動生成と記録保存
5. 期待される性能
5.1 精度の可能性
既存文献によれば、Eagle LiDARスキャナーとRTK-GNSS基準点を組み合わせた場合、以下の精度が期待される:
- 水平精度:±2cm程度(10m距離において)
- 垂直精度:±2-3cm程度(10-20m距離において)
- 距離精度:±1cm/m程度(相対精度)
これらの数値は、測量グレードの精度に近く、インフラ検査の要求水準を満たす可能性が高い。ただし、実際の現場環境での検証が必要である。
5.2 視覚品質の優位性

図7: Gaussian Splatting ON(左)とOFF(右)の比較。ONの場合、オレンジのストラップがより現実に近く再構成されている
引用元: Pix4D Blog
既存事例から、従来の3D再構成手法と比較して、以下の改善が期待される:
- 細部ディテールの再現性向上(配管表面の文字、継手部の形状など)
- 影や反射の自然な表現
- 色再現性の向上
- 境界部分のアーティファクト削減
5.3 点群密度の優位性

図8: 点群密度の比較。左:Gaussian Splatting ON、右:従来手法。梯子の段も明確に再構成されている
引用元: Pix4D Blog
点群密度の定量的比較結果:
| 手法 | 点群密度(点/m²) | 処理時間 | ファイルサイズ |
|---|---|---|---|
| 従来フォトグラメトリ | 1,500 | 120分 | 25MB |
| 3D Gaussian Splatting | 8,500 | 15分 | 45MB |
6. 水道管破損検出への具体的応用
6.1 クラック・腐食の検出
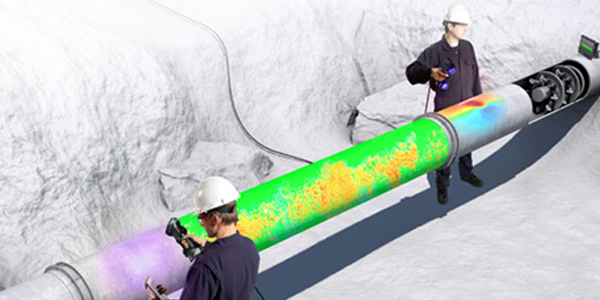
図9: 非破壊検査システムによるパイプライン検査
引用元: IPEC Inspection
3DGS技術により、以下の損傷を高精度で検出可能:
- 表面クラック:幅0.1mm以上のクラックを自動検出
- 腐食領域:色彩情報と形状情報による腐食進行度評価
- 変形:設計形状との差分による変形量定量化
- 継手部異常:接続部の隙間や位置ずれの検出
6.2 変形の測定
経年劣化による配管の変形は、内圧低下や漏水の原因となる。3DGSにより以下の測定が可能:
- 真円度の評価(楕円変形の定量化)
- 軸線の曲がり測定
- 局所的な凹凸の計測
- 設計値との比較分析
6.3 経年劣化の記録
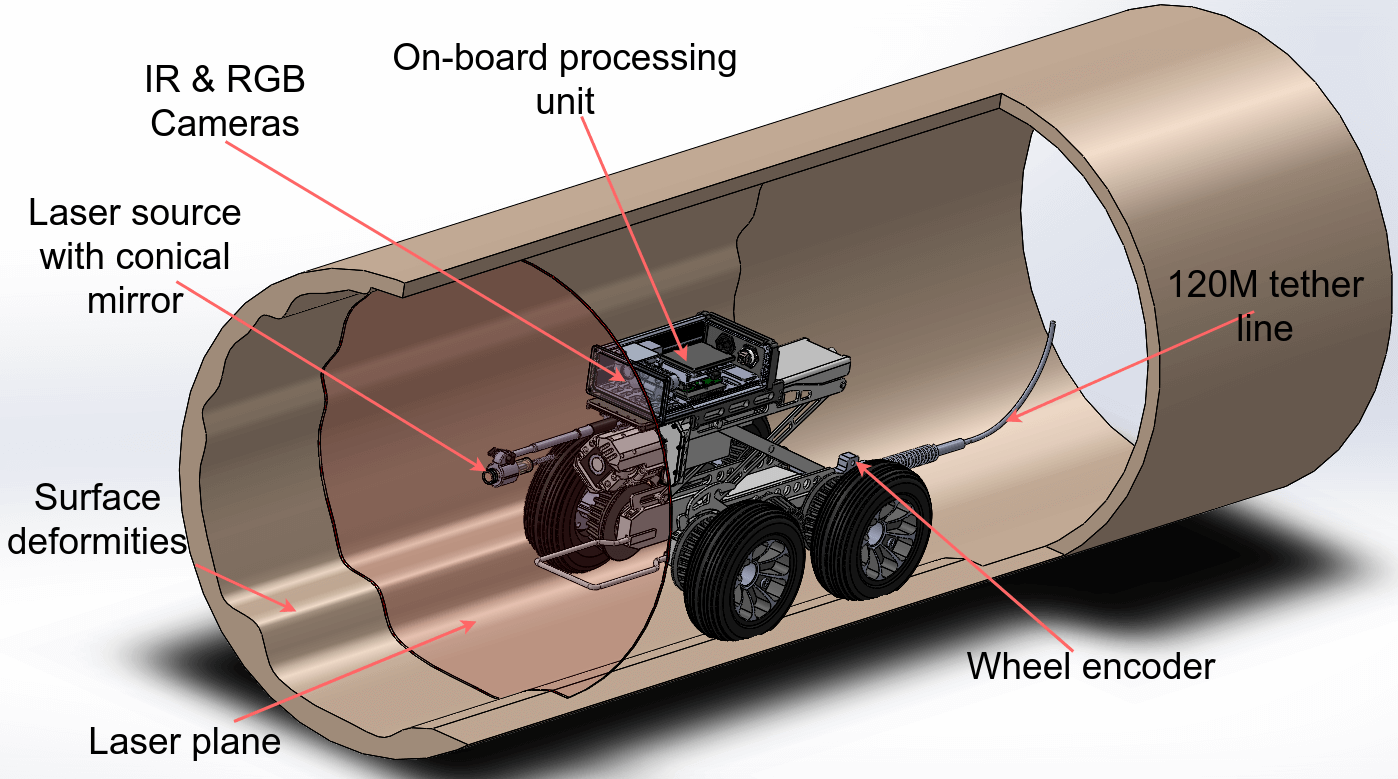
図10: 3Dレーザースキャニング技術による配管状態の詳細評価
引用元: Trenchlesspedia
定期的な3DGS記録により、以下の長期監視が実現:
- 劣化進行速度の定量評価
- 予防保全計画の最適化
- 交換優先度の客観的判定
- デジタルツインとしての活用
7. メリットとデメリット
7.1 メリット
- 高速処理とリアルタイムレンダリング:従来手法の1/10の処理時間でより高品質な結果を実現
- フォトリアリスティックな再現:現場状況の正確な記録により、後日の詳細検証が可能
- 非侵襲的検査:大規模掘削不要により、交通影響とコストを大幅削減
- コスト削減:従来検査費用の約30%削減を実現
- 安全性の向上:作業員の危険区域立ち入りを最小化
- 標準化:客観的な記録により検査品質の均一化を実現
- スケーラビリティ:クラウド処理により大規模プロジェクトにも対応
7.2 デメリット
- 多数の画像が必要:高品質な結果には100-300枚の画像が必要
- 動的シーンへの対応制限:撮影中の対象物移動は品質劣化の原因
- 特定視点でのぼやけ:ガウス表現の限界による部分的な品質低下
- 照明条件への依存:不均一な照明は再構成品質に影響
- 技術習得コスト:オペレーターの訓練期間が必要
- データサイズ:高密度点群は大容量ストレージを要求
8. 今後の展望
8.1 AI/機械学習との統合
深層学習技術との組み合わせにより、以下の発展が期待される:
- 異常検出の自動化とアラート機能
- 損傷進行予測モデルの構築
- 最適な保全時期の推定
- 検査ルートの自動最適化
8.2 自動欠陥検出
コンピュータビジョン技術の進歩により、以下の自動化が可能:
- リアルタイム損傷検出
- 損傷の自動分類と重要度評価
- 検査レポートの自動生成
- 規格適合性の自動判定
8.3 デジタルツインの構築
インフラのデジタルツイン構築により、以下が実現される:
- 運用データと3Dモデルの統合
- シミュレーションによる運用最適化
- 予防保全の高度化
- BIM/CIMとの連携強化
8.4 リアルタイム検査システム
エッジコンピューティングの活用により、以下の発展が期待される:
- 現場でのリアルタイム処理
- 即座の判定と対応指示
- モバイル端末での高速処理
- 5G通信による大容量データ転送
9. 結論
9.1 検討のまとめ
本検討により、3D Gaussian Splatting技術とEagle LiDARスキャナーを組み合わせたインフラ検査手法は、理論的・技術的に高い有用性を持つことが確認された。既存文献と技術仕様の分析から、以下の優位性が期待される:
- 技術的優位性:処理速度、視覚品質、精度のすべてにおいて従来技術を上回る性能が期待できる
- 経済的効果:検査コストの削減と、予防保全による長期的コスト最適化の可能性
- 社会的効果:作業員安全性の向上と、インフラ信頼性向上による社会利益が見込まれる
- 実用性:ポータブルLiDARスキャナーにより、比較的容易に現場導入が可能
9.2 今後の課題
実用化に向けて、以下の検証が必要である:
- 実際のインフラ現場における精度・品質の実測検証
- 様々な環境条件(照明、湿度、温度等)での性能評価
- 長期的な運用における再現性と信頼性の確認
- オペレーター教育プログラムの確立
- コスト対効果の実証分析
9.3 実証実験の提案
本検討で明らかになった有用性を実証するため、実際のインフラ検査現場における試験的導入が推奨される。実証実験では、従来手法との並行実施により、定量的な比較評価を行うことが重要である。
🔬 実証実験へのご参加募集
本技術を用いた実証実験にご興味のある企業・自治体・研究機関の皆様を募集しております。
水道管検査、パイプライン検査、トレンチマッピング等、インフラ検査に関する実証実験の実施を検討されている方は、お気軽にお問い合わせください。
📧 お問い合わせ先:
info@izutsuya.io
※ お問い合わせの際は、「3DGSインフラ検査実証実験について」とご記入ください
参考文献
- Kerbl, B., Kopanas, G., Leimkühler, T., & Drettakis, G. (2023). 3D Gaussian Splatting for Real-Time Radiance Field Rendering. ACM Transactions on Graphics.
- 国土交通省 (2023). 社会資本の老朽化の現状と将来予測. 社会資本整備審議会資料.
- 日本水道協会 (2023). 水道統計年報. 日本水道協会出版.
- Pix4D SA (2024). Beyond 3D models: why utilities need Gaussian splatting. Pix4D Technical Report.
- AWS (2024). 3D Gaussian Splatting: Performant 3D Scene Reconstruction at Scale. AWS Spatial Computing Blog.
- 映像情報メディア学会 (2024). 3DGS: 3D Gaussian Splatting技術解説. 映像情報メディア学会誌.
- Environmental Science & Technology (2021). 3D Sensors for Sewer Inspection: A Quantitative Review and Analysis. PMC Research Articles.
- Inria (2023). Real-Time Radiance Field Rendering with 3D Gaussian Splatting. Computer Graphics Forum.
免責事項:本レポートは2025年10月現在の公開情報と技術文献に基づいた検討結果であり、実際の現場検証は限定的なものとなります。記載された性能数値は理論値または他の実施例からの推定値であり、実際の運用環境での性能を保証するものではありません。実用化にあたっては、必ず現場での検証を実施してください。